We had fun with this year’s game; it resembled “robot basketball.”
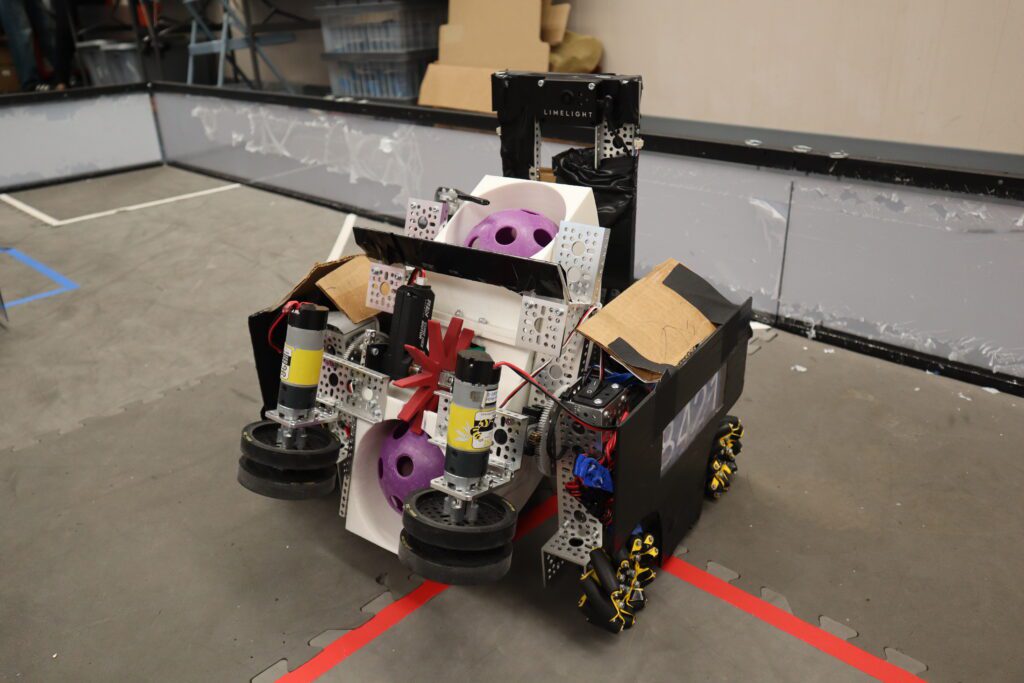 The middle school team’s robot was designed to play defense by bullying other robots, bumping them as they tried to shoot, then continuing close to the basket and shooting a layup (or three). Middle school had a solid auto, scoring three balls every time using a catapult design for the shooter. It shot three balls in less than 600 milliseconds. It also used a camera to detect patterns and used it to score the three balls in a particular order to maximize their score. They could also maximize their score by shooting subsequent shots in the desired order. It had a very fast reload, able to reload three balls simultaneously. The middle school robot had an elevator feature to rise up off the mat and was only one of two robots in New Jersey to accomplish that feat. Their robot was good at both scoring and at playing defense. Appropriately, their robot was named Lebron.
The middle school team’s robot was designed to play defense by bullying other robots, bumping them as they tried to shoot, then continuing close to the basket and shooting a layup (or three). Middle school had a solid auto, scoring three balls every time using a catapult design for the shooter. It shot three balls in less than 600 milliseconds. It also used a camera to detect patterns and used it to score the three balls in a particular order to maximize their score. They could also maximize their score by shooting subsequent shots in the desired order. It had a very fast reload, able to reload three balls simultaneously. The middle school robot had an elevator feature to rise up off the mat and was only one of two robots in New Jersey to accomplish that feat. Their robot was good at both scoring and at playing defense. Appropriately, their robot was named Lebron.
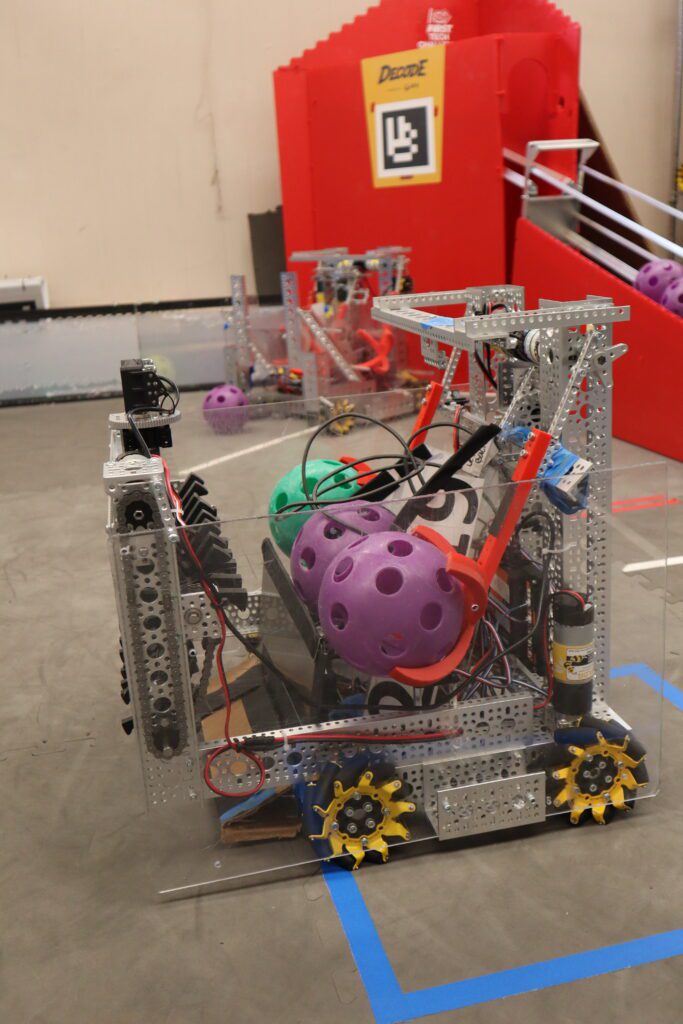
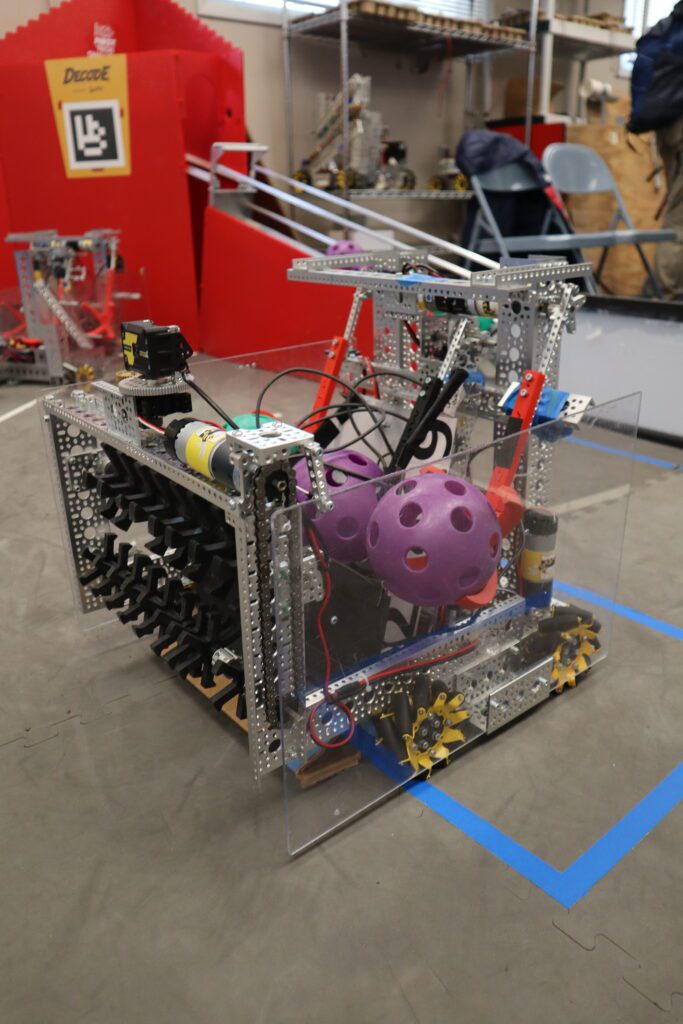 The high school took a different approach. Instead of a bruiser, they wanted a robot that was good at long distance. They had a very efficient approach that used the same motors for intake and shooting. They had two different ways to intake the balls, hand-loading or using their intake wheels. They used a video camera to auto-aim their robot and to auto-adjust the angle and power of the shot so they were one of the most accurate long-range robots. They primarily focused on the three-point shot. They spent a lot of time refining the accuracy of their robot.
The high school took a different approach. Instead of a bruiser, they wanted a robot that was good at long distance. They had a very efficient approach that used the same motors for intake and shooting. They had two different ways to intake the balls, hand-loading or using their intake wheels. They used a video camera to auto-aim their robot and to auto-adjust the angle and power of the shot so they were one of the most accurate long-range robots. They primarily focused on the three-point shot. They spent a lot of time refining the accuracy of their robot.
Both teams did well and were in the elimination rounds of the conference championship.
Special thank you to the team sponsors, parents, and Mr. Carr for his passion and dedication to the Robotics’ students and program!